|
|
|
 |
The hardware - under the hood |
The steering and brake hardware and controllers are located under the hood. Since the Polaris engine is under the seat, there's considerable room under the hood. That's one of the reasons we chose the Polaris Ranger. We've used up most of that room.
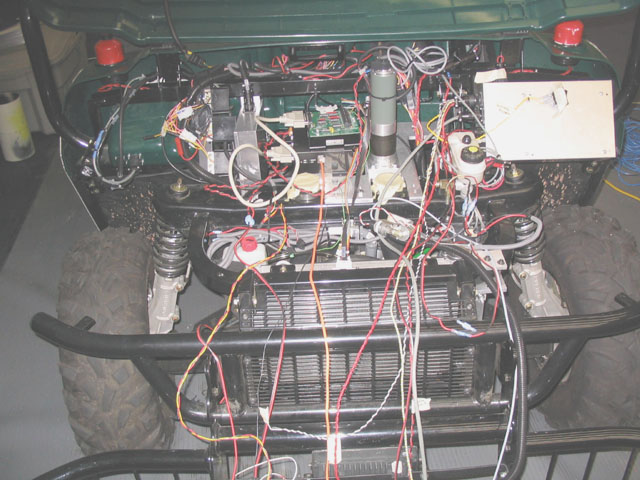 |
Overview of the hood area. It's not finished, but all the key components are in place. Dirt shields have been removed. |
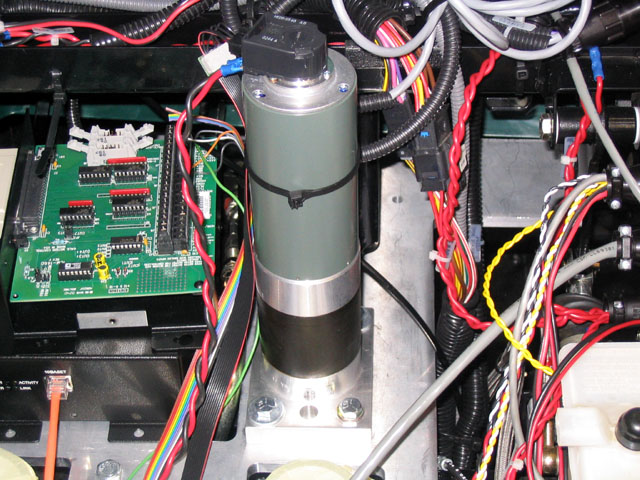 |
Steering actuator The steering motor is a geared brush-type DC servomotor, powerful enough to turn the wheels even with the vehicle not moving. It is connected to the steering box below via a rubber shock coupling. Peak motor current in normal operation is about 8 amps at 24 volts. This was more than the original MicroMo controllers could reliably deliver, but the Galil DMC Econo Series controller to the left of the motor delivers its rated current with no problems. |
| The Galil controller and its opto-isolator board are to the left of the motor. Previously, three MicroMo controllers were packaged and mounted in that space, but their replacement Galil controllers have not yet been permanently packaged. We will fit two Galil controllers and the opto-isolator board into that tight space. | |
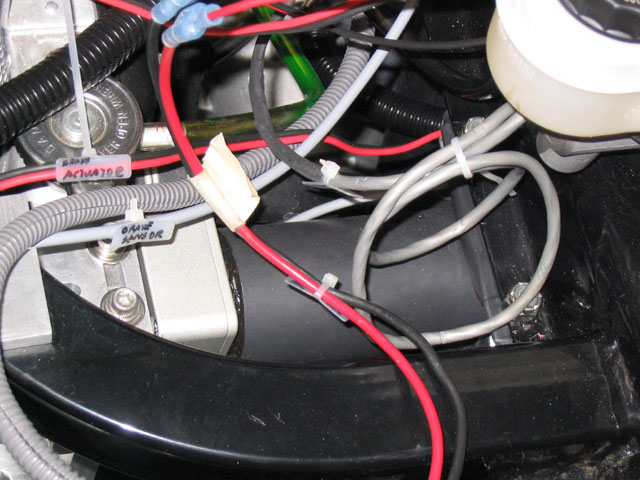 |
Brake actuator The black cylinder to the left is a DC servomotor driving a ball screw. Located below and behind the brake master cylinder, the high-speed actuator can start braking within 200ms of actuation. A pressure sensor, read by the Galil controller, and a pressure limit switch, used to stop the brake actuator after an emergency stop, are attached to the brake line for the front wheels.
|
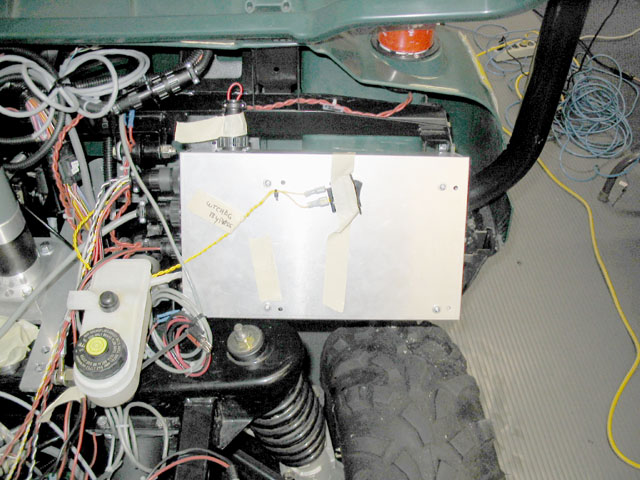 |
Emergency stop relay box Inside the box are several automotive relays (rated for high temperature and vibration) which perform emergency stop functions. When the emergency stop system is activated, the brake actuator is driven to the brakes-locked position, the throttle actuator magnet releases the throttle to idle, and the engine ignition is disconnected.
|
|
The emergency stop system contains a hardware watchdog device which must see a change in its input every 200ms. That device is connected to a digital output on one of the Galil controllers, and one of the back bed computers must change the state of that output every 200ms, or the emergency stop system triggers. So if any key element in the control system stops functioning, the emergency stop system trips. Loss of the radio E-stop signal, or pressing one of the big red buttons on the vehicle, also trips the emergency stop system. |