|
|
|
 |
The hardware - sensors |
 |
Laser rangefinder The popular SICK LMS unit, mounted on a tilt head built for us by Newmark Systems. In use, this assembly sits atop the roll cage. Its job is to profile the terrain ahead of the vehicle.The scanner is normally aimed at the ground about 1.5 to 2 stopping distances ahead of the vehicle. Since this is a line scanner, we mounted it on a tilt head to get a second axis of scan.
|
| The SICK LMS units are reliable and rugged, but are single-line scanners. That's marginal for good off-road navigation. We do what we can to piece together a terrain model with a line scanner. | |
 |
Radar speedometer The downward-pointing sensor is a Dickey-John radar speedometer usually used on tractors. To the right and below, attached to the rear differential and connected by an armored cable, is the odometer sensor, which magnetically senses a toothed wheel on the driveshaft.
|
|
By comparing the outputs from these two sensors, we can detect wheel slip.This tells us when to downshift to low and engage 6 wheel drive mode. |
|
 |
Camera Used for visual road following. A Unibrain Fire-I 400 FireWire color camera enclosed in a Pelco security camera enclosure. |
|
The Overbot road follower, written by John Pierre, is able to find and follow dirt roads. It is not dependent on road markings. The camera was on a tripod, not the vehicle, when photographed here. |
|
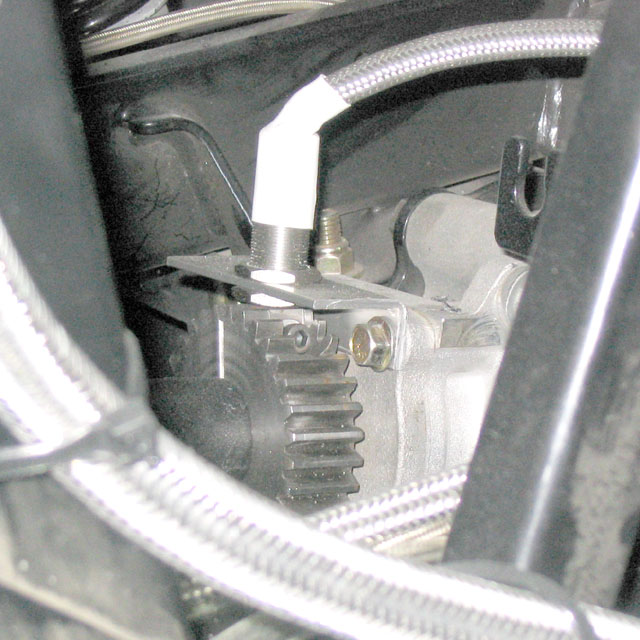 |
The large gear is sensed by the Hall-effect sensor above it. Unlike most sensors of this type, this one provides quadrature information and thus can sense both speed and direction. |
| The armored cables are made from washing-machine hoses. This part of the vehicle, between the wheels, is unprotected from ground dirt and gravel, so everything there must be heavily armored. | |
 |
GPS
receiver and antenna
This Novatel ProPak GPS is capable of positional accuracy to 15cm, when receiving Omnistar corrections. |
| The data from the GPS is combined with the data from the inertial system in the computer box and the odometer sensor to provide reasonably accurate position even when the GPS signal is lost. Khian Hao wrote the software to perform that task. | |
 |
Phased-array
radar
The Eaton Vorad anti-collision radar senses car-sized obstacles out to about 100 meters. |
| The VORAD unit reports target range, range rate, and bearing. So we can use it to distingush other vehicles from the background. Its most critical function is sensing big, obvious obstacles and triggering a stop. While the VORAD data goes into the mapping system along with everything else, it's also monitored by a simple "seconds to collision" program, which will stop the vehicle if a collision is iminent. |