|
|
For
participants only. Not for public distribution.
|
 |
Note #24
John Nagle |
The industry
The basic problems with range image devices are that they aren't very good, and nobody can make any money with them. Companies that have exited the business include ERIM, Leica, Schwartz, and General Dynamics. NordLynx, CSEM, and Acuity are still in the business, but not shipping in volume. There are a few very expensive (> US$100K) systems with high-power lasers used in airborne applications, and a few slow, accurate systems used for ground-based surveying. Only SICK Optic, in Germany, is routinely shipping useful products. Non-scanning rangefinders, though, are quite common. Simple devices that can range out to half a kilometer in daylight sell for a few hundred dollars, and are built into binoculars and rifle scopes. Thus, the basic rangefinding problem isn't the obstacle.
The technologies
There are several known ways to approach this problem.
|
Device
|
CW/Pulsed
|
Technology
|
Images?
|
Example
|
Limitations
|
| Laser rangefinders | Continuous | RF modulated | Single point | Surveying devices | Requires mechanical scanner. |
| Imager | CSEM Ranger | Must illuminate whole field of view at once. | |||
| Cavity oscillator | Single point | Acuity | Requires high optical power beyond a few meters. Requires mechanical scanner. | ||
| Imager | none | Technology unsuitable for imaging. | |||
| Pulsed | Counter/timer | Single point | ERIM, SICK, others | Requires mechanical scanner. | |
| Imager | New startup | Must illuminate whole field of view at once. | |||
| Range gated imager | Single point | none | Not useful enough to make. | ||
| Imager | NordLynx, Stanford Computer Optics | Needs one pulse per range unit to build range image. Must illuminate whole field of view at once. Requires expensive microchannel plate technology. Works poorly in sunlight. |
The all-electronic solutions require illuminating the whole field of view. At any significant range, doing this in daylight requires excessive optical power.
The mechanically scanned solutions require fast-moving mirrors of considerable size (inches). The technologies are basically those of Baird-type mechanically scanned TV, circa 1935. Performance is poor and the market is tiny.
A possible hybrid approach
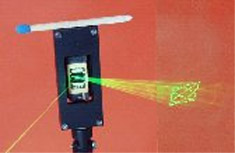
Mechanically scanning the outgoing beam isn't too bad, because the outgoing beam is tiny. The problem is on the receive side, where a sizable light bucket is needed, requiring large moving mirrors. Few 2-axis scanners have been built. The machinery is thus large and sluggish. If we only had to scan the outgoing beam, we'd be in good shape.
Just providing a big optical aperture focused on a single detector doesn't work well. All the ambient light in the entire field of view hits the detector, overwhelming the returned beam.
But suppose we had an array of detectors at the focal plane of a large lens. Now, each detector only sees a small fraction of the ambient light. But the currently relevant detector sees almost all the light from the returned beam; and has a good S/N ratio.
The detector array required is specialized, but simple - it's an array of avalanche diodes or other high-speed photodetectors. It's not necessary that there be a detector for each pixel. Only enough detectors are required to get the S/N ratio up to acceptable levels.
Most of the needed components are available.
MEMS scanners
Suitable scanning devices exist as prototypes.
 |
Franhofer Institute 2D scanning mirror Up to 60 degree deflection. |
This is well within current MEMS technology. The Texas Instruments mirror-array video projectors are much more elaborate devices. Similar devices are built for network switch components.
Laser pulsers
Not a problem. Note that with an agile mirror, we don't need as many pulses per second, because we get more control over where we look.
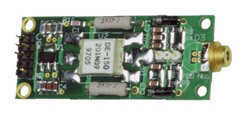 |
Directed Energy, Inc pulsed laser diode driver Designed for
LIDAR applications. |
50KHz is more than enough for this application. The rise time is marginally adequate, but may limit precision.
Detector arrays
The technology is coming along. It might even be here.
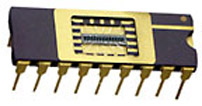 |
Pacific Sensor 16 Element Linear Silicon Avalanche Photodiode Array Designed for LIDAR applications. |
It's only a linear array, but that's 16x better than a single detector. These parts might be enough to allow building a useful scanning laser rangefinder for our application. We might have electronic scanning for one axis, and a rotating prism for the other axis.
Pacific Sensor says they can make these devices in up to 64-cell arrays. An 8x8 array would be very effective here.
Detection and timing circuitry
No off-the-shelf solution yet. But that doesn't require a custom IC.
Using a hybrid scanner
For off-road driving, such a device could be very effective. Assume the following performance specs.
|
Item
|
Value
|
Notes
|
| Data point acquisition rate | 50KHz | Pulser and laser can do this |
| MEMS scanner angle | ±45° optical | Mirror only has to move half that. |
| Max scan speed | 5KHz full range | Can Franhofer do this? |
| Ranging precision | 20cm | Tough; pulses aren't that sharp. But SICK does far better. |
| Max range | 60m | Optimistic goal |
This device is fast enough that it can do the job of several line scanners and have time left over for looking around. The "is the road ahead flat" task only requires about 20% of the available scan time. Because the mirror is so agile, we can take most of our data where we want data, instead of being flooded with irrelevant data points.
The "is the road ahead flat" task can be viewed as scanning a line of 25 data points every 10ms. That's only 2500 points per second. With so much extra bandwidth, we could scan overlapping zigzags and just look for big differences as a flat-road test, simplifying processing and making the system more immune to vibration. Between scans devoted to that task, we can use the device to look at other things.
Is this device buildable? We have to crunch the numbers. More on this later. I'll make some phone calls. Comments?